Cet article est issu d’un e-mail envoyé à quelqu’un qui demandait des renseignement à propos des variateurs de vitesse électroniques. Comme je ne suis pas un expert, j’espère ne pas avoir pris trop de liberté avec la vérité dans mes explications. Envoyez moi les corrections et les récriminations (en anglais) en cliquant sur mon nom ci-dessus. (vous pouvez aussi envoyer les mêmes remarques au traducteur, en français cette fois, qui traduira pour l’auteur.)
Principes de fonctionnement d’une radiocommande moderne
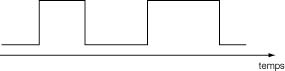
Les émetteurs/récepteurs des radiocommandes modernes pour les modèles réduits d’avions, de voiture (ou de bateau N.d.t)... utilisent ce que l’on appelle la modulation de largeur d’impulsion. La radio envoie des signaux qui ressemblent à des impulsions où le signal monte, reste à l’état haut pendant un instant, puis descend. La figure 1 montre un diagramme de ce type.
Remarquez que j’ai dessiné la seconde impulsion plus large que la première ; c’est la donnée essentielle : cela dit au récepteur quelle information l’émetteur envoie, et c’est pourquoi cette méthode est appelée modulation de largeur d’impulsion. C’est en réalité un petit peu plus compliqué que celà parce que les impulsions ne sont pas transmises telles quelles mais sont encodées (AM ou FM selon la manière dont l’onde radio code le niveau du signal), mais ne vous inquiètez pas de ça maintenant.
Quand vous déplacez le manche ou un bouton sur l’émetteur, en avant et en arrière, l’impulsion s’élargie ou se rétrécie. Ainsi, pour détecter les manoeuvres que vous faites sur les commandes, le récepteur (dans la voiture, le bateau ou l’avion) doit mesurer la largeur de l’impulsion reçue et la comparer à la largeur normale ; si il voit une impulsion 10% plus étroite que la normale, il dit à un servo de tourner un petit peu sur la gauche ; si l’impulsion est 20% plus large que la normale, le récepteur dit au servo de tourner un peu sur la droite et ainsi de suite. Cela permet au récepteur de voir que le manche a été poussé mais aussi de combien et dans quel sens. Celà s’appelle la commande proportionnel. Cette méthode est aussi relativement immune aux interférences radio et au bruit (généré par exemple par l’alimentation.)
Mais il est aussi assez difficile de fabriquer ce type d’équipement : l’onde radio qui transporte le signal oscille environ 70 millions de fois par seconde et l’impulsion dure (selon sa largeur) de 1/1000e à 1/500e de seconde. C’est comme un obturateur d’appareil photo très rapide.
Un problème supplémentaire est que vous voulez envoyer des informations pour plusieurs choses à la fois : Le gouvernail (ou la direction), la vitesse du moteur ou encore les ailerons pour un avions. Comme dans un équipement RC, il y a habituellement au moins 2 voies, en un cycle, au moins deux impulsions sont transmises : l’impulsion du canal 1, l’impulsion du canal 2, (celle du canal 3), etc puis le cycle se répète. L’information de l’état de chaque canal est envoyée dans des trames : répétition de la séquence d’impulsions avec généralement 50 trames par seconde. Canal 1, canal 2, ... puis une petite pause pour séparer la trame qui vient de se terminer de la trame suivante puis une autre trame. Le récepteur doit débrouiller tout celà et envoyer les bons signaux aux connecteurs de sortie (là où sont branchés les servos).
Fonctionnement avec un variateur de vitesse
Avec un variateur de vitesse électronique, il n’y a pas de servos qui font fonctionner les commandes sur le modèle, vous déplacez le manche des gaz ou vous pressez un bouton et vous voulez que le moteur électrique qui propulse la voiture, le bateau ou l’avion accélère ou ralentisse. Le variateur doit comparer la largeur de l’impulsion reçue à celle d’une impulsion normale et, selon le résultat, envoyer plus ou moins de puissance au moteur.
Aujourd’hui, la première phase, comparer les largeurs d’impulsion, peut être faite de manière simple avec un simple circuit intégré appelé amplificateur opérationnel ou comparateur accompagné de quelques résistances et condensateurs pour moins de 20FF. Ce montage va produire une tension fonction de la largeur de l’impulsion (par exemple 0V si l’impulsion a une largeur normale, -0,5V si elle est un petit peu plus étroite et +2V si elle est un peu plus large. Cette phase ne pose pas de problème.
L’inconvénient est que la plupart des circuits intégrés modernes sont incapables de fournir de forts courants (et même de petits moteurs dans des voitures ou avions demandent beaucoup d’ampères quand ils démarrent ou tournent à pleine puissance, plus qu’un moteur d’ouverture d’une porte de garage !). Pour faire en sorte que ce signal faible contrôle un moteur électrique gourmant en énergie, vous avez besoin d’un amplificateur de puissance.
Par conséquent, des gens ont inventé de merveilleux gadgets, les interrupteurs intégrés, qui sont relativement petits mais peuvent conduire de forts courants. Parmi eux, il y a le MOSFET de puissance (Metal Oxide Semiconductor Field Effect Transistor), qui est un type spécial de transistor. Vous appliquez une petite tension sur l’une des broches (la grille) et les deux autres broches (la source et le drain) conduisent le courant (comme un interrupteur classique) et peuvent conduire un très fort courant avec une faible résistance ; vous cessez d’appliquer la tension et les deux broches cessent de conduire le courant.
En choisissant un MOSFET, faites attention à la tension Drain-Source maximum (les équipements RC classiquent utilisent du 20V, mais à causes des pics d’induction, il faut au moins 60V), au courant permanent maximum (autant qu’il est possible ! 10A est le minimum pour un petit moteur), à la tension de seuil de la grille (c’est à dire la tension qu’il faut appliquer à la grille pour que le transistor conduise ; seul les FET utilisés en electronique numérique sont passant avec 5V, avec les autres types, il faut employer des systèmes pour augmenter la tension) et à la résistance équivalente du transistor passant, plus c’est bas, mieux c’est et vous pouvez la diminuer en cablant plusieurs FET en parallèle.
Mais c’est toujours du tout ou rien, pas du proportionnel. Vous voulez que le moteur tourne plus ou moins vite et non qu’il s’arrête et redémarre brutalement. Donc, la plupart des variateurs électroniques prennent cette petite tension (rappelez-vous, celle qui sort du comparateur) et la découpe en morceaux ; ils appliquent la tension de contrôle au MOSFET et le font commuter très rapidement : plusieurs milliers de fois par seconde ou plus. Selon l’amplitude de la tension de contrôle, le MOSFET reste passant pendant un instant plus ou moins long (voir figure ci-dessous). Le moteur conserve son mouvement (aucun moteur ne peut s’arrêter et redémarrer 1000 fois par seconde), mais il reçoit plus ou moins de puissance et donc il tourne plus ou moins vite. C’est exactement la manière dont fonctionnent les variateurs électronique des lampadaires halogènes : ils envoient la puissance par petits jets à l’ampoule, mais vous ne la voyez pas clignoter car le rythme est trop élevé mais l’ampoule est plus ou moins brillante. Voir figures 2 et 3.
Pour diverses raisons, cette manière d’alimenter par impulsions les équipements de puissance est très bonne et beaucoup plus efficace que le bon vieux rhéostat qui consomme d’énormes quantités d’énergie. Elle permet aux moteurs de démarrer avec plus de couple et de consommer moins qu’ils le devraient.
Il y a quelques complications (faire en sorte que le moteur puissent tourner dans les deux sens, qu’il puisse freiner (dans le cas d’une voiture), etc). Celà demande des dispositifs supplémentaires comme des FET de freinage qui avalent l’énergie générée par le moteur quand il tourne à cause du flux d’air ou d’eau ou de l’inertie et peut charger les accus, ou un pont en H qui utilise plusieurs FET pour envoyer le courant dans un sens ou dans l’autre pour faire tourner le moteur en marche avant ou en marche arrière.
Mais l’idée principale est simple :
 Mesurer la largeur de l’impulsion qui vient du récepteur ;
Mesurer la largeur de l’impulsion qui vient du récepteur ;
La traduire en un petit signal de tension analogique ;
Commuter l’alimentation du moteur si rapidement qu’il va tourner régulièrement mais plus ou moins vite selon la largeur des impulsions.

 Contact
Contact Liens
Liens Agenda
Agenda Plan du site
Plan du site Groupe de discussion
Groupe de discussion