Sur un Marine Travelift, chaque fonction est commandée par un moteur à pression d’huile. Ces moteurs sont alimentés par un compresseur couplé à un moteur diesel traditionnel. Les moteurs à pression d’huile sont petits, et peuvent se loger n’importe où.
Chaque moteur est alimenté par un réseau de tuyaux qui courent partout sur la structure.
 |
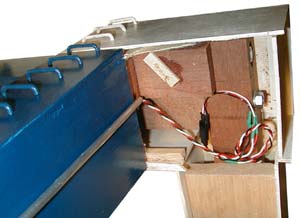
Marine Travelift 300 tonnes Sous la poutre latérale droite, le compartiment moteur et le compartiment des treuils sont en position suspendue, donc proches du sol, ce qui facilite les réglages et les entretiens. |
Impensable de miniaturiser tout ça, il va faloir improviser : Sur le vrai, les quatre paires de roues sont motrices ! sur la maquette, un seul train de roues le sera, et la transmission se fera par chaine. Les roues avant seront directrices, mais la commande se fera avec un servo par train de roue. La cabine du poste de pilotage sera présente, mais bien sûr, tout fonctionnera par radio.
MOVE
 | Moteur réducté 4127 proposé par ROBBE |
Sous la traverse de droite, une structure suspendue abrite le moteur diesel. C’est sous cette structure (qui sur la maquette cachera batteries et récepteur) que je fixe un moteur réducté, avec sa roue dentée dans l’alignement du train de roues. La chaine de transmission passe juste entre les pneus, et l’astuce sera pratiquement invisible. Pourquoi avoir choisi la transmission par chaîne ? ...Ben pourquoi pas ! ? cette solution correspond bien à mon esprit qui n’est pas trop "mécanique". Elle est souple, et il est facile de calculer les rapports.
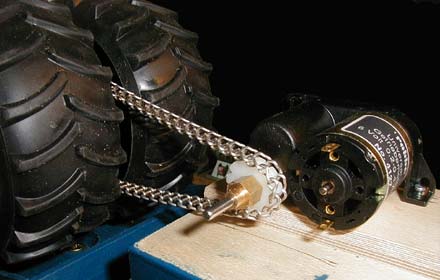 |
Vitesse de pointe grandeur : 23 mètres/minute Le moteur qui tourne à 3500 U/Min est réducté à 85,33:1. Le rapport des roues dentées est de 3:1. La maquette atteindra donc +/- 5 mètre/minute |
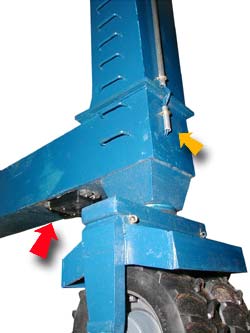 | La direction Flèche jaune : sortie des cables du servo. Flèche rouge, le servo. |
& DRIVE
Un seul canal commandera les deux servo de direction, branchés avec un cable en Y. L’emplacement décalé du servo (flèche rouge) fait que la poussée de la tringlerie n’est pas symétrique, en virage à droite ou à gauche. L’exploitation de ce principe permetra aux roues de suivre des courbes concentriques lors des virages. Toutefois, je n’ai pas poussé jusqu’à calculer exactement les trajectoires. Simplement, les roues étant quand même distantes de + de 70 cm, le "broutage" des pneus sera minime.
 | Le poste de commande |
La cabine de conduite d’un élévateur se trouve toujours à l’arrière, surélevée, de facon à permettre au pilote une vision parfaite de la manoeuvre. Le poste de pilotage contient toutes les fonctions de contrôle de translation, direction et levage, avec notament la commande séparée des 6 treuils et l’ajustement des trolleys d’écartement des groupes de palans.
La maquette est construite en ctp de 2 mm, Et elle est fixée à la structure par des glissières qui permettent son ajustement lateral. Cette fonction ne sera pas radiocommandée. L’échelle est réalisée en fils de laiton soudés sur gabarit : tous les éléments coupés à dimension sont disposée sur une planche, maintenus par des clous ou des épingles, et les jonctions sont enduites de soudure en pâte. Un coup de brûleur, et tout est soudé.

 Contact
Contact Liens
Liens Agenda
Agenda Plan du site
Plan du site Groupe de discussion
Groupe de discussion