Un des gros avantage d’Internet est de permettre à des modélistes distants de se concerter pour la mise au point d’un modèle original difficile à mettre au point avec ses seules connaissances et les seuls conseils que l’on peut espérer trouver au sein d’un club. Grâce aux forums de discussions du web, on fait appel à une grande quantité de modélistes et les avis, conseils et réflexions arrivent rapidement de tout l’hexagone et même d’au delà des frontières.
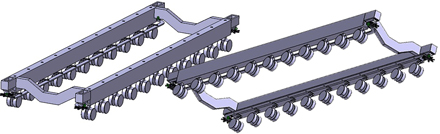
Le sujet de l’étude qui fait le sujet de cet article est la présentation sur un forum de modélisme naval, par François, modéliste de Conques-sur-Orbiel (petit village près de Carcassonne), d’un ber au 1/35e pour son remorqueur Zeeland, représentant un chariot porte-bateau autotracté MTB 300, reproduction de celui qui est commercialisé par la firme Cimolai Technology
En vrai ça ressemble à quoi ?
 © Cimolai Technology spa
|
 © Cimolai Technology spa
|
La reproduction fidèle réalisée par François était facilitée par le fait que son ber n’est pas fonctionnel. Bien entendu, le système de traction et de rotation des roues devra être adapté et simplifié si on réalise une maquette fonctionnelle radiocommandée.
Première étude : commande indépendante par côté au moyen d’une barre latérale de forme étudiée
On part donc de l’idée d’une commande de toutes les roues d’un même côté par une tringle commune posée latéralement.

Premier dessin proposé : la forme de cette tringle est particulière et son déplacement parallèle ou oblique oriente les roues de façon proportionnelle.
Des risques de problèmes sont évoqués (danger qu’un essieu s’inverse après un angle de 90°) et difficulté à intégrer cette barre latérale dans la poutrelle qui soutient les roues.
 Etude de commande latérale
|

Ces dessins et les réflexions qu’ils déclenchent ont le mérite de faire apparaitre une autre possibilité : la commande de toutes les roues par une barre commune placée au centre du ber
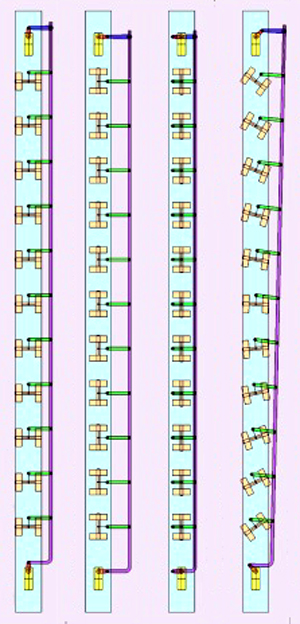
La commande de tous les trains de roues par une tringle centrale
Les élucubrations continuent et découlent vers un système central qui devrait fonctionner. On arrive à un dessin remis au net : Si la longueur des biellettes (de l’axe de pivotement des roues à l’articulation de la biellette) est égale au rayon du bras du servo, les roues doivent pouvoir passer de 90° d’un coté à 90° de l’autre en suivant exactement la position des servos. Et les roues doivent prendre des positions "différenciée" si l’on manuvre les servos en sens opposés.
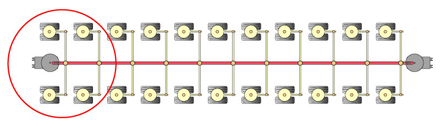
Les biellettes vont d’un train à l’autre, elles sont fixées par une rotule sur la barre centrale
L’articulation de la barre sur le guignol du servo se fait dans un trou oblong qui permet l’angulation de la barre (longueur variable entre les guignols des servos avant et arrière
 Dessin simplifié avec seulement trois trains de roues, mais si ça va pour trois, ça va pour onze !
|
Bien entendu, le choix d’utiliser une seule barre de commande en position centrale induirait une forte différences avec la structure de l’original de la marque CIMOLAI pris en exemple au départ du projet. Mais il est évident que ce ne serait pas la seule différence avec le vrai charriot, alors pourquoi ne pas imaginer aussi l’original ?
Motorisation du ber
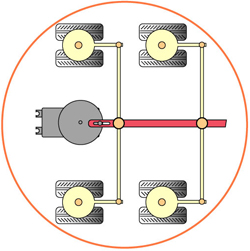
Une remarque est évoquée : Lors de la rotation de chaque train de roues (et c’est très net pour une rotation de 90° sans déplacement), les deux roues d’un train de roues tournent en sens inverse. Pour éviter le freinage à la rotation il faudrait que les deux roues soient folles sur leur axe. Si cela ne pose pas de problème pour les trains porteurs, pour les trains moteurs c’est moins simple : on peut n’avoir qu’une roue motorisée, l’autre étant folle. Il faut noter toutefois que la roue motrice présente un frein à la rotation si le moteur est arrêté.
Mettons ça en dessin :
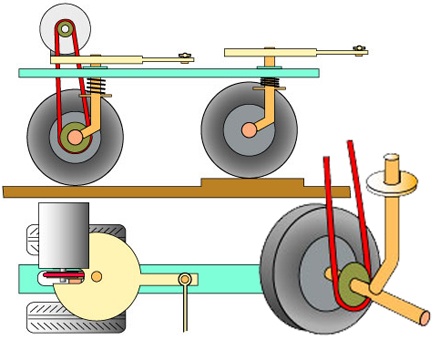
Pour la motricité, une seule paire de roues pourrait être motrice, commande par chaîne, moteur fixé sur le plateau rotatif de la roue. Il est facile d’imaginer une suspension en incluant un ressort sur l’axe de rotation. Afin de faciliter la rotation et ainsi soulager l’effort à fournir par les servos, une forme de fourche pourrait être donnée à l’axe des roues

 Contact
Contact Liens
Liens Agenda
Agenda Plan du site
Plan du site Groupe de discussion
Groupe de discussion