Le sous-marin réel
C’est un SNLE Russe développé par la société RUBIN (Léningrad-St Petersbourg). C’est le plus gros sous-marin au monde : il fait 170m de long, 16,50m de haut, plus les 9,50m du massif, et il est large de 22m. Le tout pour un poids moyen de 25000 tonnes.
Depuis les années 80, il y a eu six sous-marins de ce type ; aujourd’hui il n’en reste que trois en service dont un qui sert de banc d’essai pour le missile "Bulava" (voir infos Wikipédia).
 Les Typhoons au repos.
|
Liste des navires
- TK-208 Dmitri Donskoi : entré en service en 1981, modifié en 2003, depuis 2005 il sert de plateforme d’essai du SS-N-30 Bulava.
- TK-202 ? : entré en service en 1983 et retiré en 1999.
- TK-12 Simbirsk : entré en service en 1984 et retiré en 1996.
- TK-13 ? : entré en service en 1985 et retiré en 2004.
- TK-17 Arkhangelsk : entré en service en 1987.
- TK-20 Severstal : entré en service en 1989.

Le modèle réduit
J’ai choisi de représenter le TK-208 Dmitri Donskoi avec l’aide de photos prises sur le net.
Voici donc mon nouveau sous-marin, le "TYPHOON". C’est un kit en PVC thermo moulé entièrement fabriqué par la société Lecma RC, unique socièté française à avoir produit des sous-marins radiocommandés.
 © Image tirée du site Lecma RC.
|
 © Image tirée du site Lecma RC
|
Ce sous-marin est prévu pour une plongée statique par ballast. Ce kit n’est plus disponible actuellement, le magasin n’existe plus.
A ce jour, il n’existe que peu de modèles de Typhoon vendus en kit, celui de la marque "Engel", celui de la marque "Kerher" et celui de "Lecma RC".
Des plans existent aussi sur Internet pour les fans de la construction en scratch.
Moi même je préfère la fabrication de A à Z, mais pour ce sous-marin j’ai saisi une opportunité. Un ami désirait se séparer de cette coque et je souhaitais la réaliser un jour, le hasard a précipité les choses.
Ce sous-marin est presque neuf et en très bon état. Je l’ai eu avec un peu de matériel déja installé, ce qui me facilite le début du travail.
 Le Typhoon à sa place dans mon atelier.
|
 Le sous-marin entier.
|
Il n’est pas conforme non plus au modèle qui est commercialisé dans le sens où il y a quelques modifications apportées par son premier propriétaire.
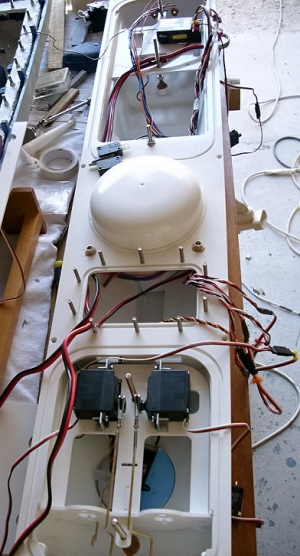
Ainsi, il possède trois ballasts, un central pour la plongée et deux autres aux extrémités qui sont en fait deux aides à la flottabilité : ces deux ballasts sont sensés rehausser le sous-marin sur l’eau quand ils sont vides.
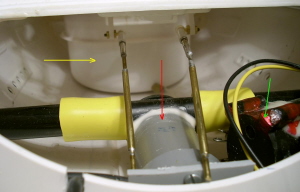
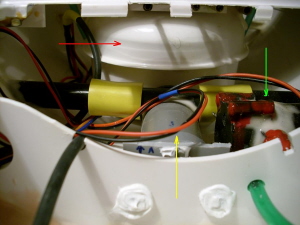
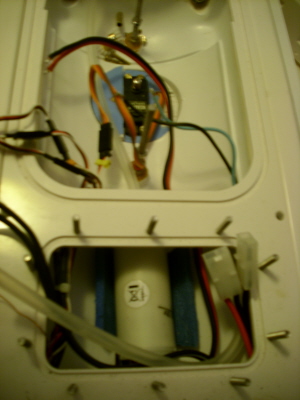
Dans la coque sont installés deux propulseurs, un d’étrave et l’autre à l’arrière, ces propulseurs sont étanches comme les deux pompes montées à côté, car cette partie de la coque sera noyée en navigation.
 Le propulseur d’étrave et à sa droite une des deux pompes.
|
Les pompes situées dans cette partie noyée servent à remplir les ballasts d’extrémités ; les fils électriques remontent dans la coque à l’aide de deux prises étanches sur les côtés.
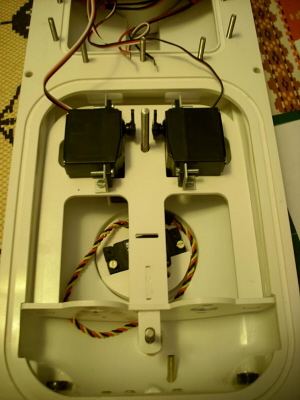
 Les moteurs et les servos de barres arrières et du gouvernail.
|
Le positionnement particulier des servos permet d’en installer un plus grand nombre si besoin : ils sont couchés alors qu’ils étaient prévus droits à l’origine.
Je vais moi aussi faire certaines modifications et changer un peu l’agencement du matériel.
 Etat des lieux dans mon atelier.
|
Il faut définir dans un premier temps les fonctions que je veux utiliser et celles que je puis maîtriser avec ma radio qui n’a pas d’extension. Il y a malgré tout neuf servos à bord qu’il faut pouvoir gérer.
Mais tout devrait bien se passer car de nombreux servos seront jumelés pour fonctionner ensembles.
 Les premiers essais de câblage et de positionnement du matériel.
|
 C’est bien plein.
|

 Contact
Contact Liens
Liens Agenda
Agenda Plan du site
Plan du site Groupe de discussion
Groupe de discussion