C’est après avoir visionné, puis revisionné les films Das Boot, U571, USS Alabama, K-19, A la poursuite d’Octobre rouge , etc. que l’envie m’est venue de construire un sous-marin radiocommandé.
Je me suis donc rendu chez mon revendeur favori afin de voir ce qui existait sur le marché. Et je me suis naturellement tourné vers le U-47 de Robbe, un U-Boot Type VIIB
Mon idée était de le transformer afin de lui permettre de plonger en statique. J’en ai profité pour y apporter quelques modifications (coque, kiosque, pont ...) afin de le transformer en Type VIIC, comme le U 96 du film Das Boot.
A travers trois articles, je souhaite vous faire partager ces phases de construction et de transformation.
 Début du chantier : mars 2003.
Début du chantier : mars 2003.
Fin du chantier : décembre 2004.
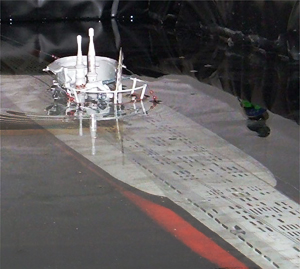
 le modèle terminé Première sortie du sous-marin à La Julienne , mon plan d’eau favori
|
CONSTRUCTION ET MODIFICATIONS
Les modifications que j’ai apportées au sous-marin sont très fortement inspirées de ce que j’ai pu lire dans la littérature. Dans un premier temps je me concentrerai sur les modifications apportées en vue de la plongée statique.
Modification de la plate-forme de commande : La plate-forme de commande est dans le tube étanche et il a fallu faire avec le volume disponible. Lorsque j’ai commencé la construction, je n’avais aucune idée de ce que je pouvais me permettre (ou pas) comme modification, notamment quant aux impacts éventuels sur la suite de la construction et le fonctionnement final du sous-marin. J’ai donc modifié le moins possible et ai suivi au plus près les articles parus dans les revues. Mais si je devais le refaire, je le ferais autrement !
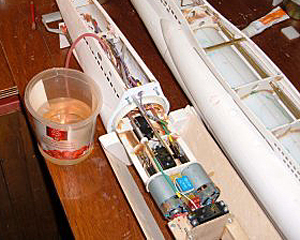
Ballast : J’ai remplacé une batterie au plomb (celle à l’avant du SM car la plus proche du centre de gravité) par une poche Baxter de 500 ml rempli par une petite pompe à engrenages Robbe alimentée en 12 V (Réf. Robbe N° 1568 - Conrad N° 22377822). Le centre de gravité était difficile à localiser au début de la construction, mais apparemment le choix était bon puisque je n’ai pas eu trop de problème d’équilibrage du SM une fois terminé. La poche se remplit en 45 secondes et le sous marin s’alourdit et plonge. Le ballast est alors rempli avec +- 650 ml d’eau. Deux petits filtres (style à carburant) empêchent les impuretés de boucher la tuyauterie. Lorsque le ballast est plein, le tube étanche est mis sous pression. Cela chasse l’eau éventuelle qui voudrait entrer par les jointures. Les tuyauteries sont en silicone de 2 mm de diamètre interne. Ils sont assez encombrants, mais ont l’avantage de ne pas se croquer.
Après quelques essais du SM terminé, il s’est avéré que le ballast était trop petit pour la taille du sous marin, qui a dû être lesté à l’extrême limite de la flottabilité pour pouvoir plonger. De plus, la pompe est assez lente, n’est pas très fiable et est de surcroît assez chère. Après 2 ou 3 plongées, elle a montré des défectuosités et à dû être remplacée. Je pense qu’elle a trop « forcé » et qu’en augmentant le diamètre interne de la tuyauterie silicone, il devrait être possible de diminuer le temps de remplissage et de diminuer les sollicitations de la pompe. Notons enfin que je n’ai eu aucun problème d’étanchéité tant au niveau de la pompe qu’au niveau de la poche baxter ou des conduites silicones.
A refaire, je remplacerais les 2 batteries au plomb par un Baxter unique de 1 litre, alimenté par une pompe plus performante (par exemple : périlstatique, lave glace de voiture). Il y a assez de place ailleurs dans le tube étanche pour loger les accus. Il serait même possible de les loger à l’extérieur du tube étanche.
Pour l’alimentation électrique de la pompe, l’idée de départ était de piloter la pompe avec un servo (standard) actionnant 2 micro-switch. Mais le système s’est avéré trop volumineux et il a été remplacé par un petit inverseur de polarité (réf. Robbe N° 8283) qui donne entière satisfaction, excepté le fait que ce n’est pas très souple d’utilisation (« tout ou rien »). Un système « failsave » (Réf. Robbe N° 1-F1650) permet de chasser le ballast en cas de « pépins ». La tuyauterie (en silicone) n’est pas munie de système d’obturation (comme décrit dans RC Marine N° 119). Le ballast a donc tendance à se vider de lui même. Ceci peut être vu comme une sécurité ; par contre, cela nuit à la navigation en plongée. Pour y remédier, un petit variateur de vitesse avant/arrière ferait très bien l’affaire : un petit apport d’eau en continu pour contre-balancer la vidange et rendrait le remplissage plus souple. Je suis en train de penser à cette solution. Lorsque le ballast est plein, un micro-switch coupe la pompe afin d’éviter tout risque d’éclatement de la poche. La poche est fixée à la plate-forme avec des élastiques afin de la forcer à garder sa forme et donc la répartition des masses.
La pompe est alimentée en 12 v - 1900 mAh avec un circuit propre (pour des raisons de sécurité)
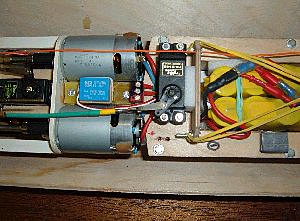
Barres avants : La boîte d’origine est fournie avec un système de régulation automatique des barres avants. Ce système n’est pas très esthétique et est de surcroît inutile en plongée statique. J’ai donc décidé d’asservir les barres avants. Le servo (modèle standard) est placé entre les moteur et l’accus au plomb de 6 v, en position perpendiculaire à l’axe du SM. La tringlerie sort du tube étanche à la place de la tringlerie de l’interrupteur de mise en marche. Le renvoi de mouvement se fera par un jeu de palonniers, et les jonctions mécaniques avec des sucres d’électricien. Sur la photo, l’accu au plomb est remplacé par des accus NiCd 12v - 1900mAh. Le fait de laisser 1 seul accus au plomb de 6 V - 5Ah s’est révélé un mauvais choix, puisque insuffisant pour faire tourner les 2 gros moteurs (pourtant : tubes étambots graissés à la graisse silicone, cardans aux deux extrémités des tubes et arbres en deux parties afin d’éviter les points durs). Cela me renforce dans l’idée que j’aurais dû laisser tomber les 2 accus au plomb au profit d’un seul gros ballast !
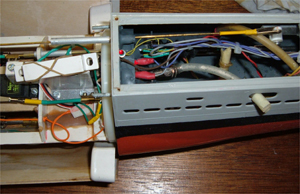
 Le système de ballast. En avant plan la pompe, à coté le servo actionant les micro-switch remplissage/vidange et au dessus le micro-switch lorsque le baxter est plein. Ce sytème de micro-switch a été remplacé par un inverseur de polarité.
|
Le système a été prévu pour la commande séparée des barres avants et arrières. Cependant elles ont été couplées (câble en Y) afin d’être asservies par un même curseur linéaire. De même, il y a un déphasage dans leurs inclinaisons à des fins de facilité de pilotage (NDLA : c’est l’expérience des « pro » que j’ai côtoyé récemment car je n’ai moi-même pas encore essayé). Un système de « failsave » met les barres en position « remontée » en cas de pépins. Notons que l’efficacité de ce failsafe est discutable. En effet : en cas de pépins les moteurs électriques s’arrêtent ainsi que le sous-marin. Donc l’inclinaison des barres est théoriquement sans effet.
La plateforme de commandes : La plate-forme d’origine a été remplacée par une plate-forme en contreplaqué de 3 mm d’épaisseur renforcée sur toute sa longueur par deux cornières en aluminium au niveau des cotés et par un profilé en « U » longitudinal au niveau inférieur des couples (cela ne me pose pas de problème, puisque de toute façon il n’y aura pas d’humidité). Elle a donc été modifiée afin : de pouvoir recevoir la poche baxter et sa pompe, le servo (standard) et les micro-switch qui actionnent la pompe (par la suite , cette solution a été remplacée par une petit inverseur de polarité prenant moins de place), le servo (standard) qui actionne les barres de plongée avant.
Le positionnement des différents composant électroniques ont été revus. Ainsi, le variateur de vitesse trouve sa place en dessous des deux moteurs (fixé sur une plaquette d’aluminium de 2 mm d’épaisseur) et le relais du circuit électrique moteur est fixé entre les deux moteurs. Les différents failsaves et le récepteur sont mis où j’ai trouvé de la place. Notons qu’un deuxième relais permet d’isoler le circuit électrique du ballast.
Enfin, un interrupteur magnétique Reed permet la mise sous tension et la coupure rapide du circuit électrique général lorsque le caisson étanche est fermé. (l’interrupteur Reed actionne les relais « moteur » et « pompe » (permettant de séparer les courants forts des courants faibles) et met le récepteur sous tension. Ce système implique un accus de réception (pas de système BEC) et permet de séparer les systèmes d’alimentation « moteur » et « pompe » (question de sécurité).
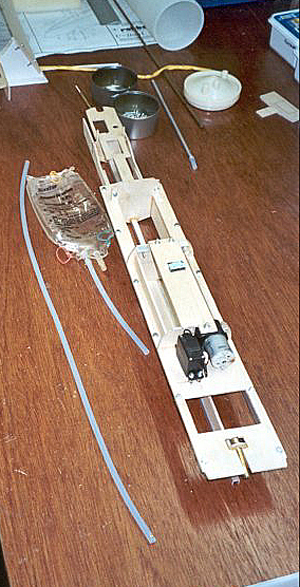
 Les différents essais avant d’arriver à la plateforme définitive
|
Voici les différentes pièces de la plate-forme, comparées à celles fournies dans la boite de construction. Un premier essai a été nécessaire (voir à droite). Il a permis d’ajuster au plus fins afin de gagner un maximum de place et rendre le dispositif le plus compact possible.

 Contact
Contact Liens
Liens Agenda
Agenda Plan du site
Plan du site Groupe de discussion
Groupe de discussion