Il s’agit donc de mon premier bateau propulsé par HydroJet ! Le principe je le connais, et j’ai eu l’occasion de tester cette motorisation à Sedan en 2011 avec le WS 45 de Thierry Jorissens. C’est simplement génial ! !
 Bien sur, les modéliste faisant de la vitesse pure vous diront que ce choix est invalidant par rapport aux hélices semi-immergées ! Ici il ne s’agit pas de pratiquer cette discipline, mais essentiellement de motoriser un modèle à l’identique - de principe - avec une vitesse sur l’eau de la maquette proportionnelle à son échelle . Personnellement, je trouve amusant de voir "déjauger" un chalutier propulsé par un moteur trop gros, envoyant le bateau à un équivalent 80 km/h ! j’écris "amusant", mais je pense "triste" !
Bien sur, les modéliste faisant de la vitesse pure vous diront que ce choix est invalidant par rapport aux hélices semi-immergées ! Ici il ne s’agit pas de pratiquer cette discipline, mais essentiellement de motoriser un modèle à l’identique - de principe - avec une vitesse sur l’eau de la maquette proportionnelle à son échelle . Personnellement, je trouve amusant de voir "déjauger" un chalutier propulsé par un moteur trop gros, envoyant le bateau à un équivalent 80 km/h ! j’écris "amusant", mais je pense "triste" !
Mon soucis a toujours été de prôner l’exactitude à tous point de vue, aspect et comportement ! Donc, pour revenir au sujet de cet article, l’installation de jets sur une maquette qui se veut exacte va lui apporter un plus évident ! Reste à choisir le jet parmi le choix restreint proposé par les fabricants.
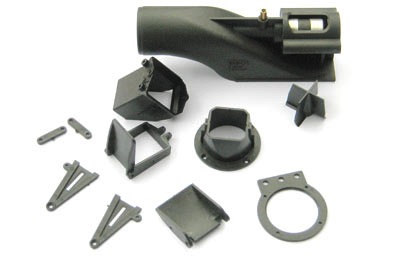
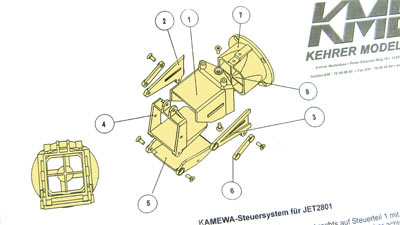
Sans rien dénigrer et sans faire de pub, après moulte réflexions, j’ai opté pour la marque KM-B, et son modèle 28mm parfaitement adapté à mon 45 Ft. Plusieurs modèles existent, j’ai choisi le systeme Kamewa, correspondant à celui qui est installé sur certaines séries de MLB 45 Ft de l’USCG
Voyons de quoi il s’agit :
Un jet se compose d’un tunnel coudé connecté au fond du bateau et au tableau arrière. Dans le tunnel, une hélice qui fait turbine aspire l’eau de sous le bateau. La sortie de l’eau, au tableau arrière, est de diamètre moindre. La réduction engendre un effet de pression qui appuie sur l’air et fait avancer le bateau. J’ai bien écris "qui appuie sur l’air", car bien qu’immergées, la sortie envoie le jet non pas dans l’eau mais dans l’air, dans le vide créé derrière le tableau arrière par l’avancement du bateau. La sortie est orientable pour assurer la direction, et un système de clapet permet d’envoyer le jet sous le bateau ce qui provoque une marche arrière.
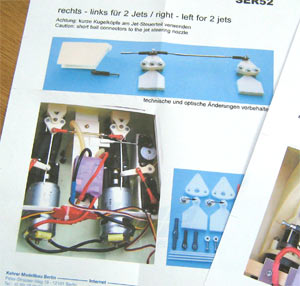
Mon 45Ft sera donc équipé de deux jets que j’ai décidé de rendre synchrones. Il y aura donc deux servos : un pour orienter les jets et l’autre pour commander le "reverse" sur les deux sorties en même temps
Déballage et montage
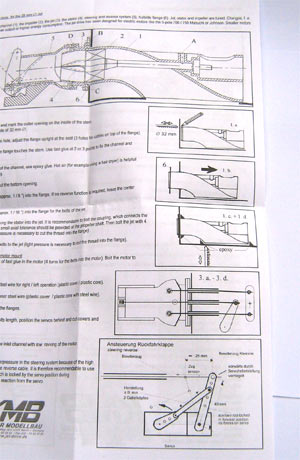
Les éléments sont livré dans un sachet, un autre petit sachet contient la visserie. Les pièces ne nécessitent pratiquement pas de finition. Le montage se fait d’après le plan d’assemblage, aux dessins très facile à comprendre si on ne maîtrise ni la langue de Goethe ni de Shakespeare
 ne permet pas de facilement installer les gouvernes - 14.5 ko") J’ai assemblé le jet en insérant le panneau du tableau arrière du bateau que je refixerais par après dans la coque, car la configuration des jets (enfoncés sour la plage arrière) ne permet pas de facilement installer les gouvernes
|
Radiocommande
Plusieurs options existent. J’ai choisi de faire une commande simultanée des
reverse des deux moteurs, et j’ai donc commandé le module
Ad Hoc. Un autre module de commande permet de commander les jets indépendamment l’un de l’autre, ce qui par exemple permet de tourner presque sur place.
 le servo de direction sera en position centrale La commande de la lige de laiton qui agira sur les deux guignols de renvoi se fait par doigt, ce qui permet d’éliminer la nécessité de réglage fin. Deux éléments ont été rivés ensemble pour obtenir un plus grande allonge. Le servo, au départ, est un modèle standard de 3,5 kg. A remplacer éventuellement par un plus fort après les premiers essais. Mais la direction ne doit pas nécessiter d’effort particulier.
|
 Le servo de marche arrière Sur un jet, le moteur qui actionne l’hélice du compresseur tourne toujours dans le même sens. Le "reverse" s’obtient en agissant sur un clapet qui dirige le jet d’eau vers l’avant du bateau en passant par dessous le tableau. La commande se fait donc avec un système de bascule qui agit sur les deux clapets simultanément. Le servo de départ est un 4,5 kg. Le principe de levier qui agit sur la bascule permettra peut être de ne pas installer un servo plus fort.
|

 Contact
Contact Liens
Liens Agenda
Agenda Plan du site
Plan du site Groupe de discussion
Groupe de discussion